MaaS
Mobility as a Service








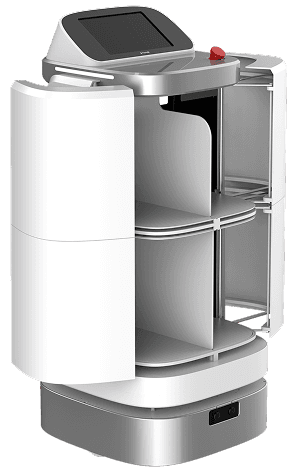
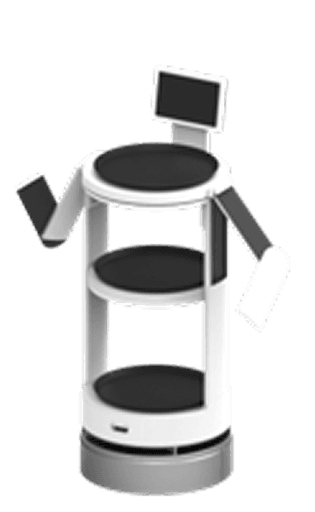
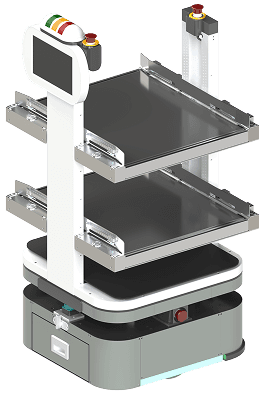
EREON ROBOT Powered by Kepler
여러 분야의 지속가능한 로봇 사업 구축, 사용자경험 개선,
데이터 파이프라인 개설 기술적으로 Mobility & AI & Actuator 문제를 단계별로 해결
Perception
정밀 환경 인지 기술



Planning
자율 주행 경로 계획 기술
로봇의 최적 이동 경로를 설정하고, 여러 로봇이 서로 커뮤니케이션 하며 제어할 수 있는 환경 구축




Control
전자 제어 현가 기술
로봇의 안정적인 이동을 위해 자체 제작 하드웨어(모터)와 진동 저감 소프트웨어(AI서스펜션) 개발